RobOT
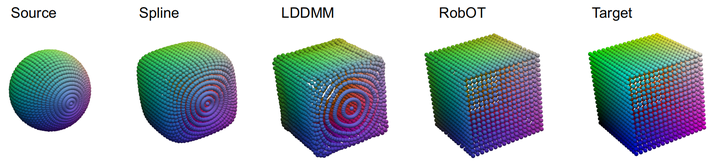
This software provides a general framework for point cloud/mesh registration based on robust optimal mass transport (robOT) / unbalanced optimal mass transport. It supports both optimization- and learning-based registration approaches. It also provides a general framework for deep prediction tasks, e.g. for 3D landmark detection. Further, we provide the PVT1010 dataset which contains 1010 lung vessel tree pairs.
The RobOT repository can be found here: https://github.com/uncbiag/robot
Marc Niethammer
Professor of Computer Science
My research interests include image registration, image segmentation, shape analysis, machine learning, and biomedical applications.